

Résumé de la première séance
1/
| Obligatoire | Interdit | Bonus | Malus |
| Suivre la ligne blanche | Percuter le robot adverse | Prendre les raccourcis | Faire tomber la deuxieme barre |
| Partir sur la ligne blanche | Adapter le programme à la forme de la piste | | |
| Faire le tour des plots | Changer de batteries | ||
| Faire tomber la premiere barre | Changer de moteur | ||
| Changer de coque | |||
| Changer de chassis |
2/
Pour l'objectif préliminaire et la coupe, nous aurions besoin de :
- Capteur à réflexion
- Résistance 1/4W
- Condensateur chimique
- Condensateur plastique
- Diode Zener
- Diode signal
- Transistor bipolaire NPN
- Amplificateurs Opérationnels
2/
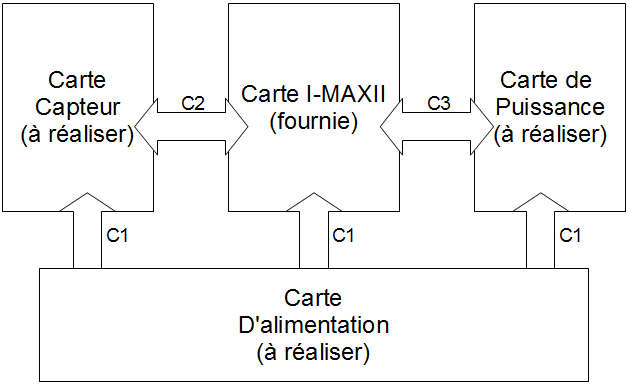
C1: La carte d'alimentation va fournir de l'energie permettant le fonctionnement des autres cartes.
C2: La carte capteur recevra et enverra des informations sur la traversé des confettis et le suivi de la ligne blanche à la carte I-MAXII.
C3: Les informations seront traités par la carte I-MAXII, puis elle pilotera la carte de puissance qui commandera les moteurs.
3/
Carte capteur :
- capteurs permettant le suivi de ligne.
- connecteurs mâle et femelle 2x7 permettant l'échange d'info ou d'energie entre les cartes
carte de puissance:
- transistors bipolaires pour la commande électronique des moteurs
- conecteur mâle et femelle 2x7
- montage hacheur afin de reguler la vitesse de rotation des roues
carte d'alimentation:
- AOP, fixer la tension de sortie
- bloc d'alimentaion
- batterie 12V
- conecteur mâle et femelle 2x7
Le tout pour à peu pres 30€.
4/
Broche 1 et 2: alimentation des cartes -> transporte en entrée/sortie l'énergie pour l'alimentation.
Broche 3 et 4: alimentation des moteurs -> transport de l'énergie en sortie pour les moteurs.
Broche 7 à 12: capteur analogiques P1.0 à p1.5 -> capteur optiques pour la traversée des confettis et le suivi de ligne.
5/
le placement ci-dessous permettrais de gerer les confettis et de suivre la ligne blanche en detectant les marqueurs sans les confondre avec un simple croisement.
x
x x
x
6/
La vitesse des roues est de 1560 tr/min et celle des moteurs de 2900 tr/min lorsque le robot est à pleine vitesse.
7/
Chaque moteur developpe 45,37 mN.m.
1,8 A traverse chaque moteur.
Chaque moteur reçoit 21,6 W.
8/
La vitesse maximale d'une roue étant 1,3 m/s, nous prendrons cette valeur comme reference.
pour une trajectoire de rayon 1,50 m, la seconde roue doit tourner à 1,1 m/s, ceci durera approximativement 1,6 s.
pour une trajectoire de 0,5 m, la roue doit tourner à 0,7 m/s durant 0,28 s.
et pour 0,3 m, la roue doit tourner à 0,3 m/s durant 0,23 s.